Il calcolo degli autovettori rappresenta la ricerca di alcune direzioni privilegiate nello spazio. Qualora i vettori e i versori orientati secondo queste direzioni subissero una trasformazione definita da una matrice quadrata A, essi non cambierebbero orientamento ma soltanto modulo. Per noi la matrice A è il Tesore d’Inerzia I. Il processo di calcolo degli autovettori inizia necessariamente con la determinazione degli autovalori ALFAi, il che è già stato spiegato nelle lezione precedente. Ogni autovalore identifica un sottospazio vettoriale, e l'autovettore corrispondente costituisce la base di tale spazio, definendo l'orientamento degli assi del nuovo sistema di riferimento. Qui troverai la lezione e l’esercitazione sul calcolo degli autovalori • Autovalori del tensore d'inerzia di un sis...
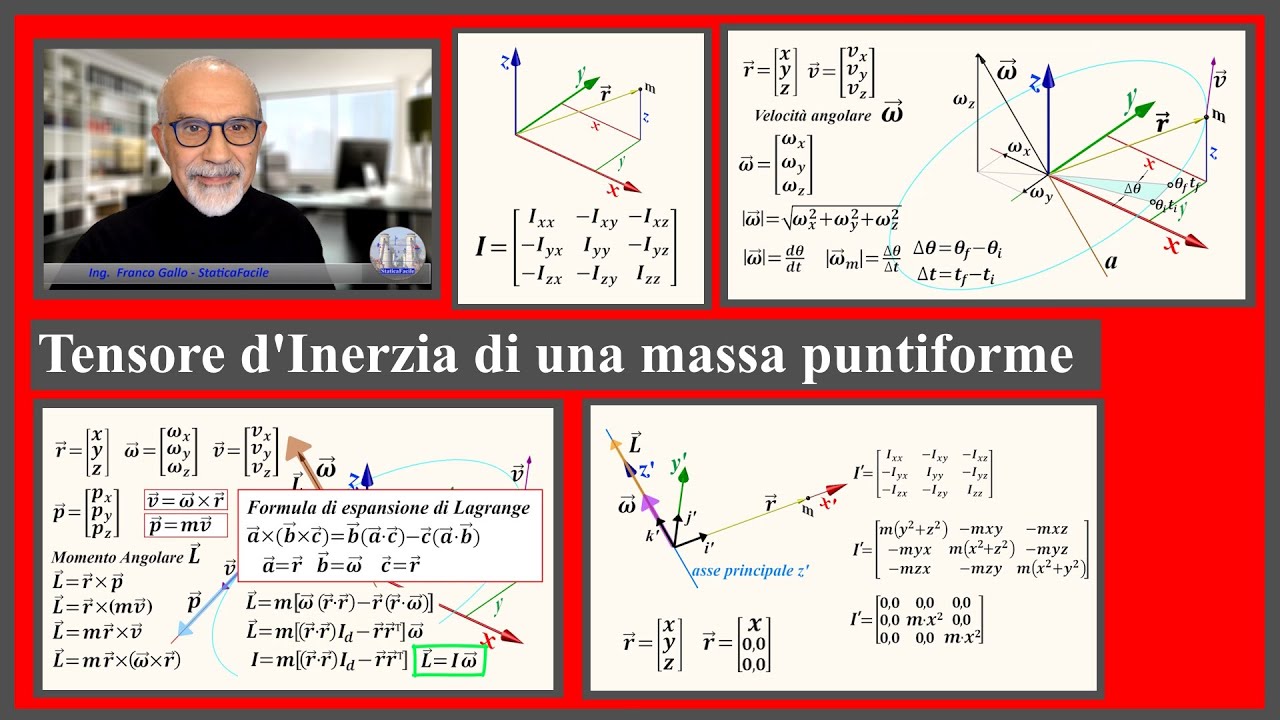
Per individuare un autovettore ui relativo a un autovalore ALFAi, si deve risolvere il sistema lineare omogeneo espresso dalla formula (I-ALFAi.Id)ui=0. In questa relazione I rappresenta il Tensore d’Inerzia (una matrice 3x3), ALFAi è l’autovalore generico (gli autovalori sono 3), Id è la matrice identità, ui è l’autovettore corrispondente all’autovalore ALFAi. Il sistema di tre equazioni in tre incognite che ne scaturisce è questo:
Prima Equazione (Ixx-ALFAi).uix-Ixy.uiy-Ixz.uiz=0
Seconda Equazione -Iyx.uix+(Iyy-ALFAi).uiy-Iyz.uiz=0
Terza Equazione -Izx.uix-Izy.uiy+(Izz-ALFAi).uiz=0
Poiché il determinante della matrice dei coefficienti è nullo per costruzione, il sistema ammette infinite soluzioni, riflettendo il fatto che un autovettore definisce una direzione e non un vettore univoco. Nella pratica del calcolo manuale, si procede riducendo la matrice o utilizzando il metodo della sostituzione, isolando le componenti del vettore (solitamente indicate come uix, uiy, uiz) in funzione di un parametro libero, necessario per gestire l'indeterminatezza intrinseca del problema. Nel caso trattato nella videolezione abbiamo proceduto col metodo di sostituzione e abbiamo assunto come parametro libero la componente uiz. Abbiamo assegnato a uiz il valore arbitrario 1 e poi abbiamo calcolato uix, uiy.
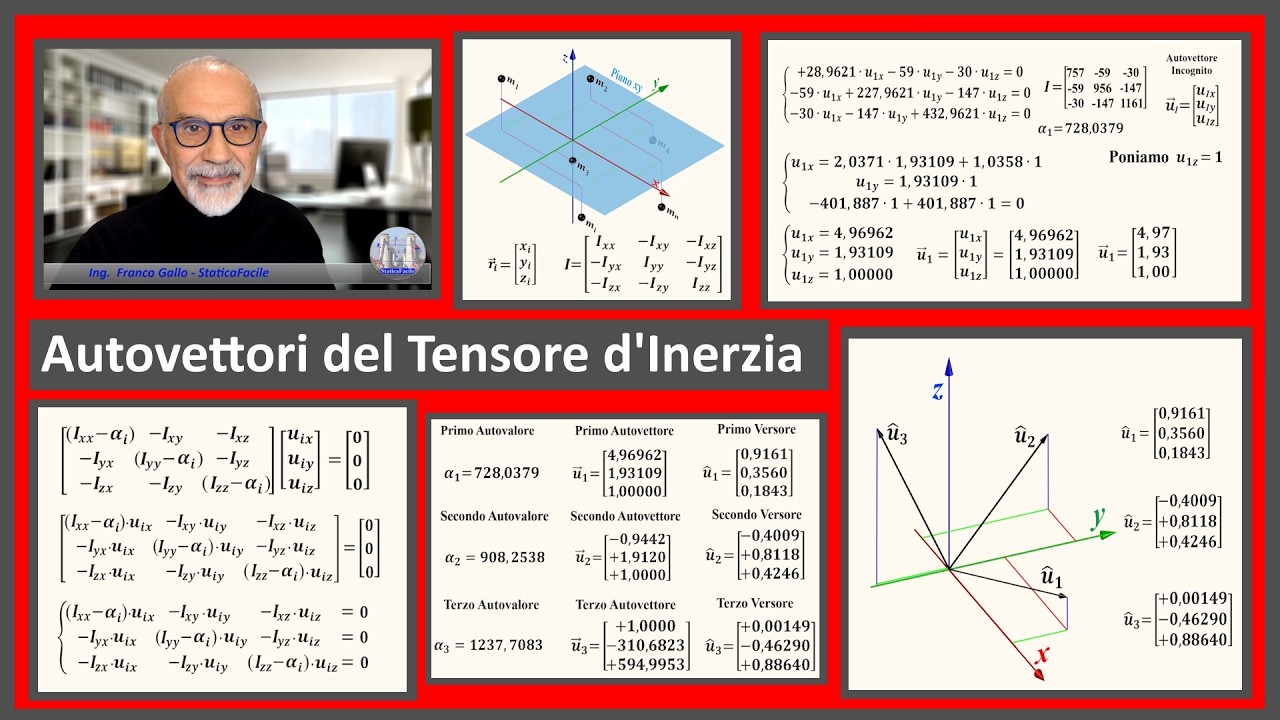
Calcolo degli Autovettori del Tensore d’Inerzia: Esempio Numerico di Risoluzione Pratica
Consideriamo un Tensore d'Inerzia noto I
Prima Riga 757 -59 -30
Seconda Riga -58 956 -147
Terza Riga -30 -147 1161
Per questo tensore sono noti gli autovalori ALFA1=728,0379, ALFA2=908,2538, ALFA3=1237,7083. Sottraendo questo valore dalla diagonale principale del tensore d’inerzia, otteniamo questa matrice
Prima Riga (757-728,0379) -59 -30
Seconda Riga -58 (956-908,2538) -147
Terza Riga -30 -147 (1161-1237,7083)
e da qui esprimiamo questa relazione (I-ALFAi.Id)ui=0 prima per i=1 e poi per i=2 e i=3. Ne scaturisce un sistema di tre equazioni in tre incognite che per i=1 si esprime così:
Prima Equazione +28,9621.u1x-59.u1y-30.u1z=0
Seconda Equazione -59.u1x+227,9621.u1y-147.u1z=0
Terza Equazione -30.u1x-147.u1y+432,9621.u1z=0
Come vedete le incognite sono le tre componenti dell’autovettore incognito u1=[u1x;u1y;u1z]. Procedendo per sostituzione e ponendo u1z=1 otteniamo l’autovettore u1=[4,97;1,93;1,00]. Attraverso la normalizzazione otterremo il corrispondente versore. Ma per questo ti invito a seguire la videolezione. Lo stesso procedimento si applica per il calcolo degli altri due autovettori di u2 e u3. Ne scaturisce il sistema di riferimento degli assi principali d’inerzia caratterizzati dai tre versori individuati.
Normalizzazione e Verifica di Ortogonalità
Come già evidenziato sopra, l'ultima fase del processo di calcolo degli autovettori riguarda la normalizzazione degli autovettori stessi. Con la normalizzazione ricaveremo versori di modulo unitario. Il passo successivo sarà la costruzione della matrice di rotazione. Il versore avrà le sue tre componenti così calcolate: Si valuta il modulo dell’autovettore come la radice quadrata della somma dei quadrati delle sue componenti e si divide ogni componente dell’autovettore per tale valore di modulo. Per il primo autovettore dell'esempio numerico qui proposto, il modulo è 5,4246 restituendo così il primo versore di componenti 0,9161 0,356 0,1843. Infine, è fondamentale verificare che la terna di versori così ottenuta sia mutuamente ortogonale tramite il prodotto scalare (che deve valere zero). Inoltre, per garantire la validità fisica del nuovo sistema di coordinate principali, viene eseguito il prodotto vettoriale tra il primo e il secondo versore, il risultato è esattamente il terzo versore.
Ma ora ti consiglio di seguire la videolezione, vedrai che ti tornerà utile.
Di seguito ti elenco alcune lezioni precedenti
Calcolo del tensore d’inerzia • Tensore d’inerzia di un sistema di masse p...
Calcolo degli autovalori • Autovalori del tensore d'inerzia di un sis...




















Информация по комментариям в разработке